全部
▼
搜索
熱搜:
位置:中冶有色 >
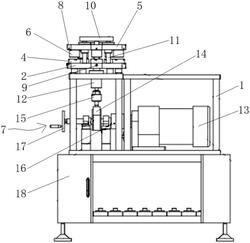
> 波形墊片疲勞試驗(yàn)機(jī)
 449
編輯:中冶有色技術(shù)網(wǎng)
來源:鄭州新泰精密量儀有限公司
449
編輯:中冶有色技術(shù)網(wǎng)
來源:鄭州新泰精密量儀有限公司
 分享 0
分享 0
 舉報 0
舉報 0
 收藏 0
收藏 0
 反對 0
反對 0
 點(diǎn)贊 0
點(diǎn)贊 0

 中冶有色技術(shù)平臺
中冶有色技術(shù)平臺粒礦物選礦技術(shù)大會")
 2025年03月25日 ~ 27日
2025年03月25日 ~ 27日 創(chuàng)新大會") 2025年03月28日 ~ 30日
2025年03月28日 ~ 30日 材料焊接與連接技術(shù)交流會") 2025年03月28日 ~ 30日
2025年03月28日 ~ 30日 術(shù)會議") 2025年03月28日 ~ 30日
2025年03月28日 ~ 30日 學(xué)合作高峰論壇") 2025年04月11日 ~ 13日
2025年04月11日 ~ 13日